Gestión óptima de sistemas de gran escala

Este sistemas se caracterizan para disponer de un gran número de componentes que trabajan de forma coordinada (la mayoría de forma remota), muchas veces distribuidos a lo largo de una superficie amplia, y en los cuales los recursos son limitados. Como objetivo de control de estos sistemas, aparte de garantizar que cada componente del proceso trabaje adecuadamente según unas condiciones predefinidas, se requiere planifica la estrategia de funcionamiento para que en función de los recursos disponibles se pueda cumplir con unas determinadas demandas. Este es por ejemplo el caso de los sistemas de distribución de agua o recursos hidráulicos de una cuenca.
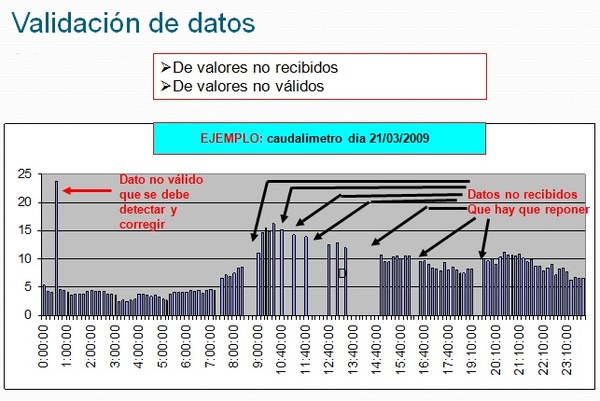
Estrategias para la validación y reconstrucción de datos
 |
|
El conjunt de test que ha de passar cada una de les dades amb una freqüència fixa (minutal, horària o diària) de l'estat de la xarxa està inspirat en els nivells de qualitat de dades de les estacions meteorològiques automàtiques definides en la norma UNE 500540.
-
- Test 1. Errores de comunicación: se trata de saber si el dato ha llegado en el instante esperado o no (minutal, horaria o diaria).
- Test 2. Se analiza si un dato supera los valora máximo o mínimo físico que son imposibles de superar por un dato coherente.
- Test 3. Se analiza la variación temporal del dato, puesto que la diferencia entre dos valores consecutivos no tiene que superar unos valores de referencia.
- Test 4. Se analiza si los sensores de una misma estación son coherentes entre sí. Por ejemplo, si la posición de una válvula indica que está cerrada no puede circular agua y el sensor de caudal tiene que marcar cero o un valor muy próximo a cero.
- Test 5. Se analiza la coherencia espacial de los datos de la red a partir de un modelo de relación entre medidas y se analiza la coherencia temporal de los datos y se compara la estimación del dato a partir de su histórico con el dato a validar.
Si un dato no pasa alguno de estos test, el dato no es fiable y tiene que ser reconstruida mediante la aplicación de uno o varios modelos (redundancia analítica) que permitan estimar su valor.
Esta metodología ya se ha implementado en la red de distribución de Barcelona la cual dispone de 400 caudalímetros y actualmente está implementado con datos horarios y diarias de la red de transporte de agua de ATLL y se considera que será un gran beneficio para aumentar la confianza en los datos del sistema de telecontrol y su posterior explotación para realizar una correcto gestión de la red, como es el cálculo del rendimiento hidráulico de los diferentes sectores de la red y/o la detección de escapes en la misma.
El Control Predictivo Basado en Modelos (MPC) se ha demostrado que es una de las técnicas de control avanzadas ampliamente aceptadas para el control de sistemas a gran escala. Aplicadas a diferentes infraestructuras a gran escala como redes de agua potable, redes de alcantarillado, redes de canal abierto o redes eléctricas confirman la aplicabilidad de esta técnica. La razón principal se debe a una vez obtenido el modelo dinámico de la planta, el diseño de MPC solo consiste a expresar las especificaciones de rendimiento deseadas a través de diferentes objetivos de control (por ejemplo, pesos en errores de seguimiento y esfuerzos de actuación como en la regulación cuadrática lineal clásica), y restricciones en variables de sistema (por ejemplo, mínimos/máximo de variables de proceso seleccionadas y/o sus tasas de cambio) que son necesarias para garantizar la seguridad del proceso y la salud de los activos.
El resto del diseño de MPC es automático: el modelo dado, las restricciones y los pesos definen un problema de control óptimo sobre un horizonte temporal fenecido en el futuro (por esta razón el enfoque se llama predictivo). Esto se traduce en un problema de optimización equivalente y se resuelve en línea para obtener una secuencia óptima de movimientos de control futuros. Solo se aplica el primero de estos movimientos al proceso, puesto que en el siguiente paso resuelve un nuevo problema de control óptimo para explotar la información procedente de nuevas medidas. De este modo, una metodología de diseño de bucle abierto (es decir, un control óptimo) se transforma en una de feedback.
Sin embargo, el principal obstáculo para el control MPC, como cualquier otra técnica de control, cuando se aplica a sistemas a gran escala de manera centralizada, es la escalabilidad. La razón es que se necesita un modelo de control enorme que es difícil de mantener/actualizar y que tiene que ser reconstruido en cada cambio en la configuración del sistema, como por ejemplo, cuando alguna parte del sistema tiene que ser interrumpida a causa de acciones de mantenimiento o mal funcionamiento. Posteriormente, un cambio de modelo requeriría volver a afinar el controlador centralizado. Es evidente que el coste de establecer y mantener la solución monolítica del problema de control es prohibitivo. Una manera de eludir estos problemas podría ser investigar las técnicas descentralizadas de MPC (DMPC) o MPC distribuidos, donde los controladores locales de MPC en red se encargan del control de parte de todo el sistema. La principal diferencia entre MPC descentralizado y distribuido es que este último requiere negociaciones y recomputaciones de acciones de control local dentro del periodo de muestreo para aumentar el nivel de cooperación.
- PLIO/SOSTAQUA/WIDE: aplicación de redes de agua potable
- CORAL/OPTIMAR: aplicación en redes de alcantarillado
- GERHYCO/PREDO/HIDROPTIM: aplicación a sistemas de rec
Como resultado de estos proyectos se han desarrollado varias herramientas de software que permiten implementar en tiempo real el control MPC.
Compartir: